Meet our very first Osibot…
OSIBOT 1 – MARY

Our platform is meticulously designed and constructed as a durable testing ground, created specifically to assess the operational efficacy and scientific contributions of various open-source systems in the real-world context of the South Pacific Ocean.
Mary’s Journey
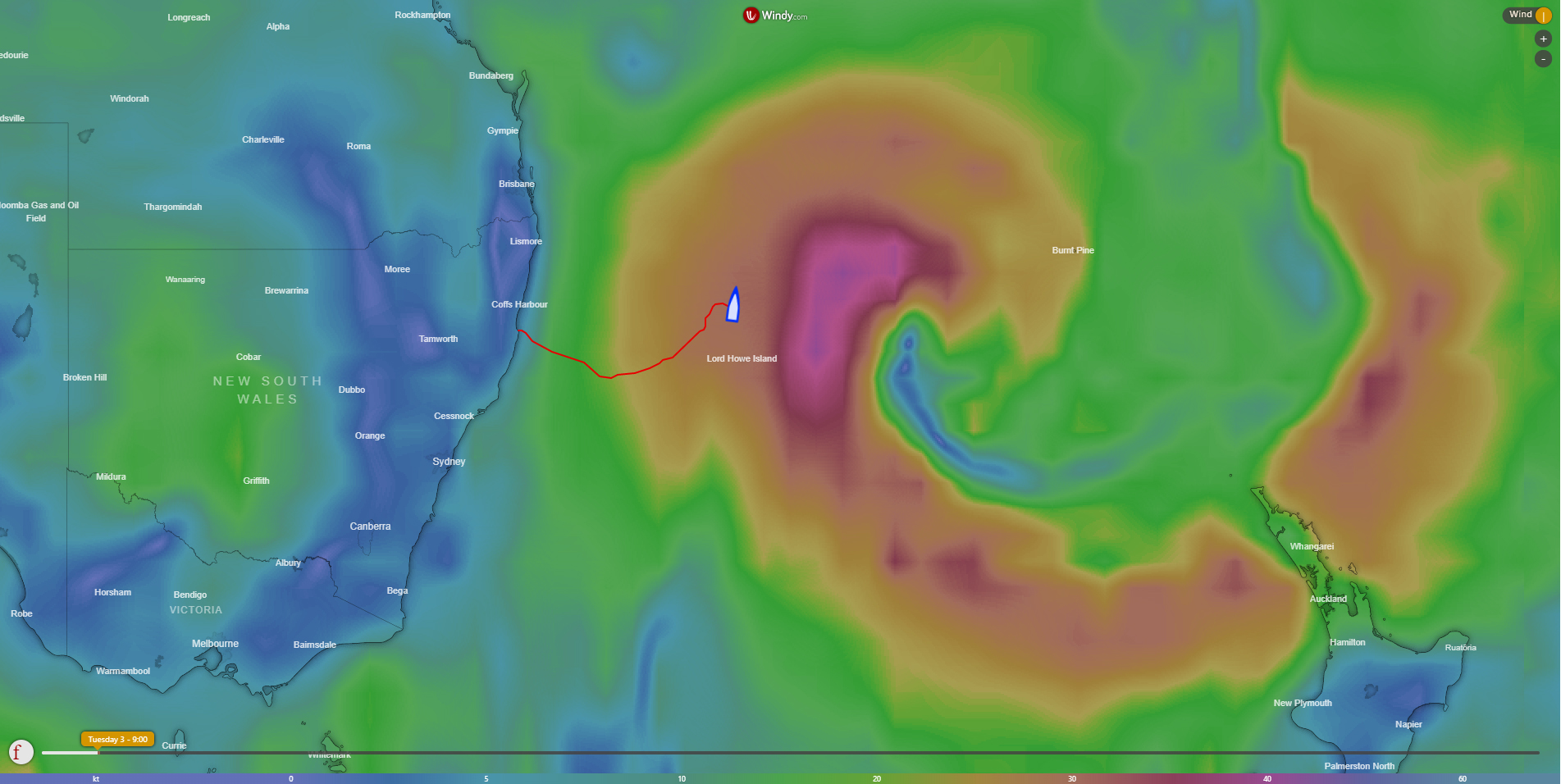


First Mission: Open Ocean Testing
Mission Status: Complete
Launched: 8th July 2019
Finished: 29th July 2019
Distance Travelled: 742 km
Max Speed Achieved: 6.1 knots
Max Wind Encountered: 42 knots
Max Wave Height Encountered: 6.2 meters
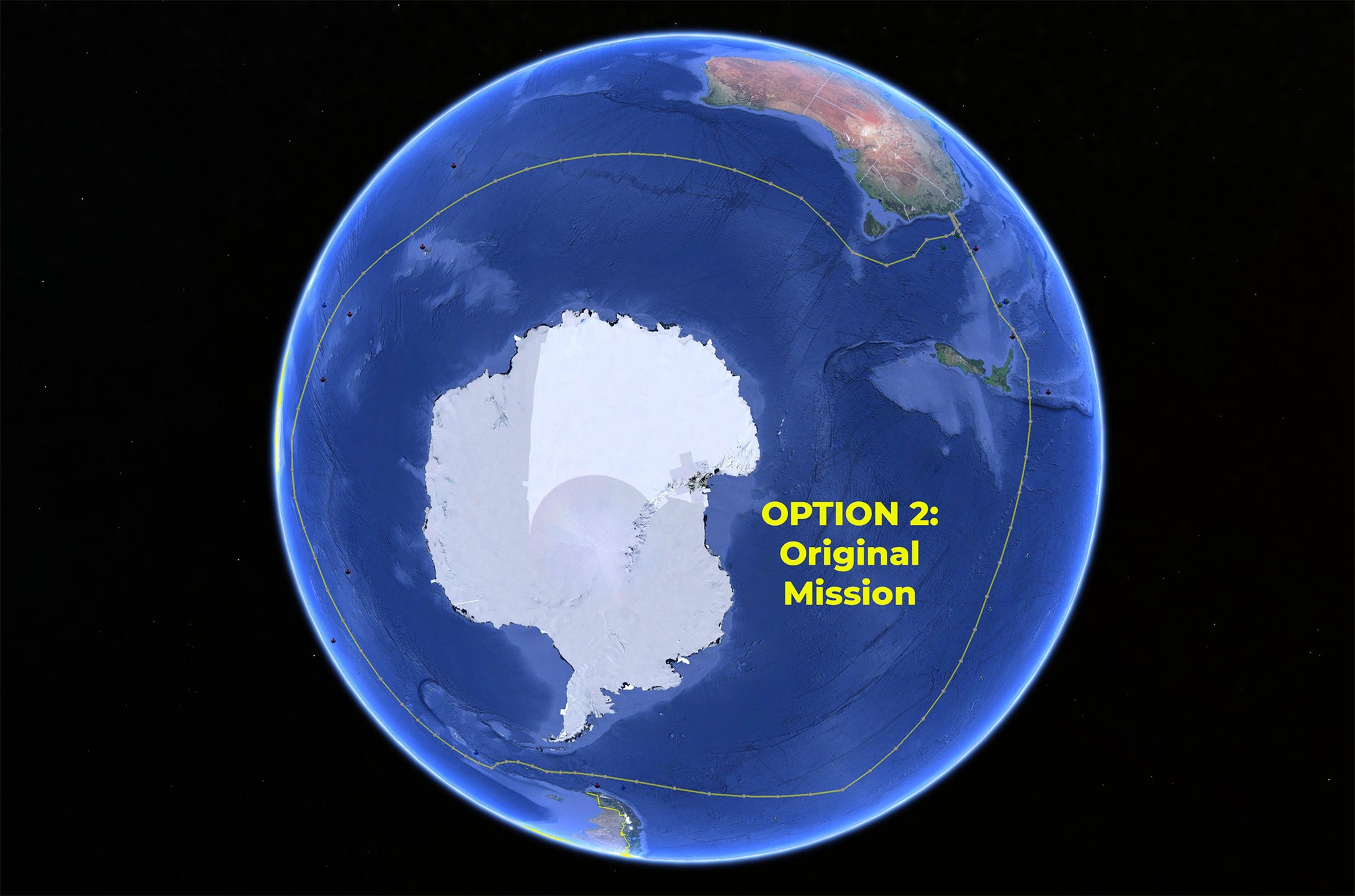
Second Mission: Southern Ocean Testing
Mission Status: Complete
Launched: 8th July 2019
Finished: 28th March 2022
Duration: 994 Days
Distance Travelled: 30,000+ km
Max Wind Encountered: 82+ knots
Max Wave Height Encountered: 12+ meters
SPECIFICATIONS:
| Length: | 5 m (16.4ft) |
| Width: | 1.5 m (4.9ft) |
| Height: | 2 m (6ft) |
| Weight: | 300 kg (661lbs) |
| Draft: | 0.7m (2ft) |
| Hull Material: | Fibreglass with honeycomb support |
| Range: | Unlimited – (2 Years – Marine Growth) |
| Speed: | 2 Knots |
| Motors: | 2x 12V 56lbs Thrust Electric |
| ESCs: | 2x 75AMP Brushed |
| Solar Chargers: | 2x MMPT |
| Batteries: | 4x 100AH Lead Acid |
| Solar Panels: | 4x 250w Flex Solar |
| Autopilot: | Pixhawk (PX4) running Ardurover |
| Communication 1: | WIFI MAVLINK |
| Communication 2: | Iridium Satellite MAVLINK Raspberry PI & Rockblock running SPL Radio Room & SPL Ground Control |
| GPS: | External GPS Receiver |
| Payload CPU: | Raspberry Pi 3+ |
| Payload Camera: | 1080p USB Web Camera (Mast) |
| Current Payload: | Timelapse Photography (2 min intervals recorded to SD Card) |
| AIS Collision Avoidance: | AIS Transmitter |
| Emergency GPS Tracker: | SPOT Trace GPS Tracker (5 min updates) |
| Lights: | 2x Solar Powered Strobes (Red & Green) |
| Version: | 1.0 |
| Current Status: | COMPLETED |
| Cost: | $10,000 R&D $10,000 Materials + 12 Months Labor |